Multi-Camera Solution
Introduction
More than one camera running on a single platform sounds not that hard. When it comes to multiple cameras working literally 'simultaneously' on one single RPi or Jetson, however, Arducam hardware is still the only capable solution so far.
To achieve such an accomplishment today, we have made substantial breakthroughs over years, from camera multiplexing to quad-camera synchronization: multi-cam adapter board, synchronized stereo camera HAT, and CamArray.
Arducam Multi-cam adapter board met the primary demands of more than one camera shooting from different angles of view, enabling users to connect up to 4 cameras to a single Pi board.
However, it only activates one camera at a time, and you have to switch between them. Arducam then released a stereo camera HAT for Raspberry Pi which allows you to connect two 5MP OV5647 or two 8MP IMX219 Pi cameras to a single standard Pi board and takes images or video at the same time. More importantly, this binocular solution makes both cameras fully synchronized.
Info
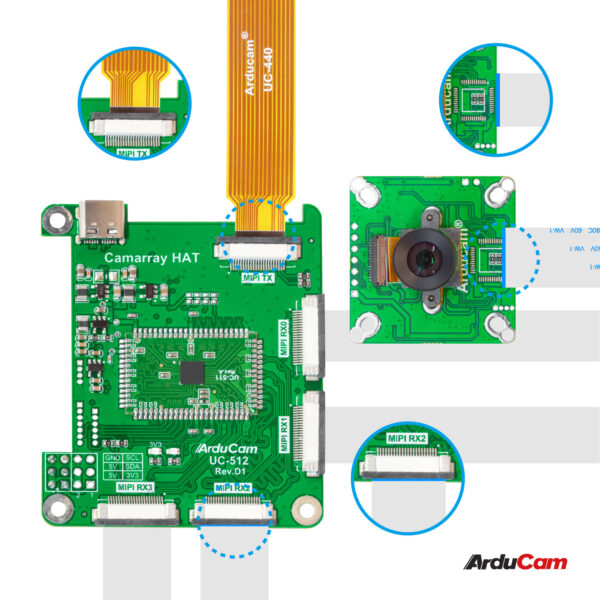
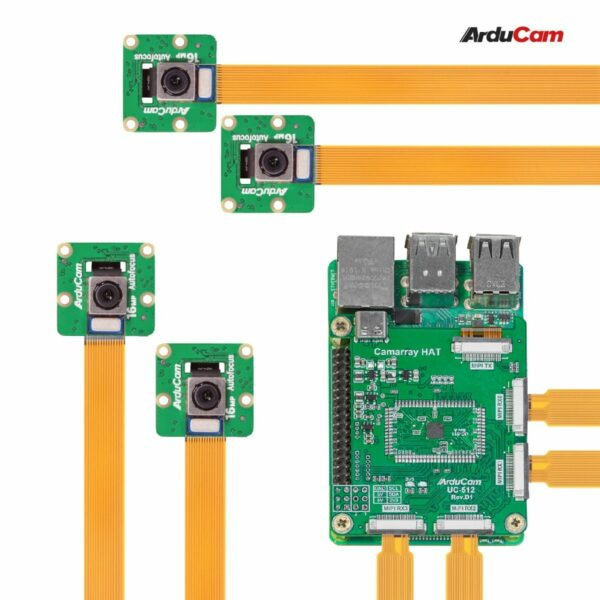
Then came the CamArray. CamArray is Arducam’s latest multi-camera solutions for Raspberry Pi, Jetson Nano, Xavier NX, and more, consisting of both hardware and software solutions. The core hardware solution breaks the limits of physical camera connectors and allows for the connection of up to 4 same MIPI cameras. The software solution makes it possible to completely display and capture video feeds from all the cameras connected, or even support image sensors that are not natively supported by the official drivers.
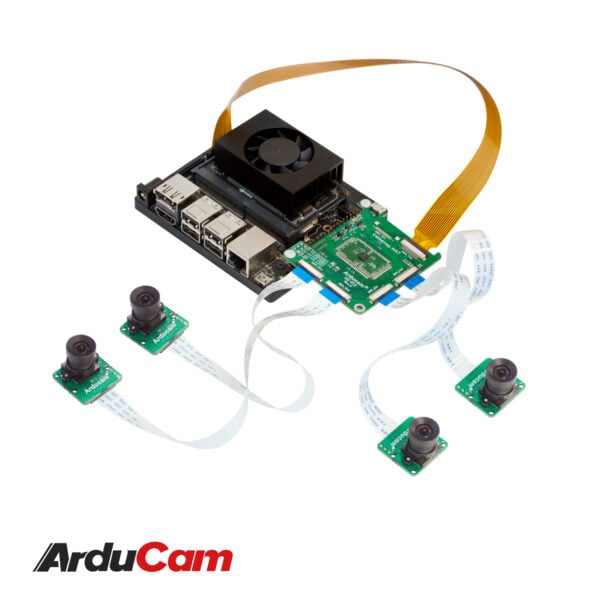
The leading actor today – the Arducam quad camera bundle kit – represents the most updated CamArray solutions that further pushes the multi-camera limits and doubles the interfacing capabilities to allow 4 synchronized MIPI camera modules to be interfaced to a single MIPI CSI-2 slot.
Besides, customization of multiple camera solutions is always open to you.
Category
Binocular Stereo Synchronized Camera Kit
The Binocular Stereo vision systems give the robots depth perception skills, which make artificial machines and systems develop an understanding of their environment.
Hence, stereo vision are used in many areas of robotics, such as self-driving cars, drones for rescue missions, robots for remote surgery.
 |
 |
 |
Quadrascopic Stereo Synchronized Camera Kit
As the upgraded version of Arducam Synched Stereo CamArray HAT, the CamArray further pushes the multi-camera limits and doubles the interfacing capabilities to allow 4 synchronized MIPI camera modules to be interfaced to a single MIPI CSI-2 slot on prevailing single-board computers like Raspberry Pi, Jetson Nano, and Jetson Xavier NX.
 |
 |
Fixed Baseline Version Camera Kit
The Fixed-Baseline version of the Arducam multi-camera solution synchronizes the outputs by integrating two sensors on a single board, with clock and I2C signal sharing together.
 |
 |
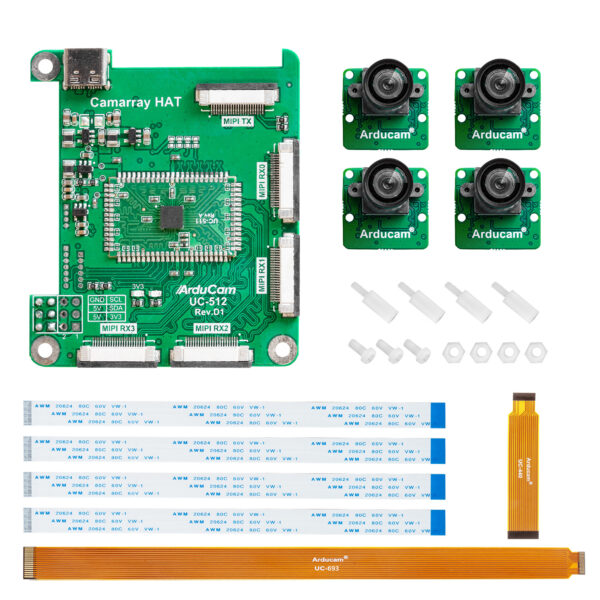
Variable Baseline Version Camera Kit
The variable baseline version of the camera kit connects the camera to the platform device via Arducam CamArray Hat, and synchronizes the clock with the i2c signal via Hat. Cameras connected using MIPI cables are also more flexible and convenient.
 |
 |
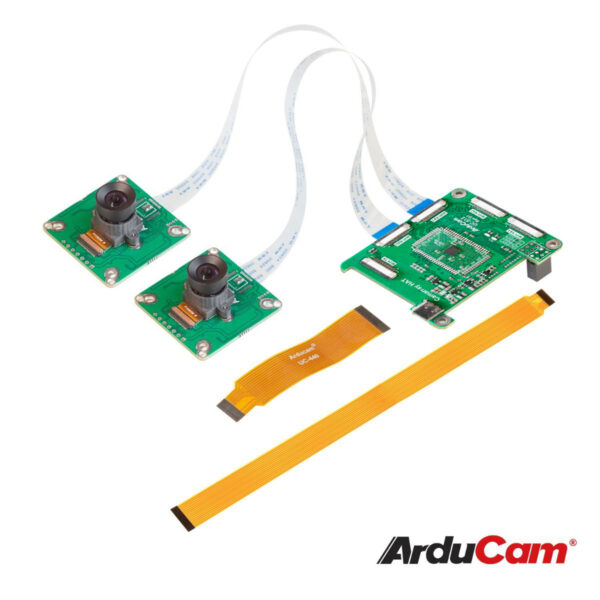
Arducam Multi-Camera Adapter Board
Arducam Raspberry Pi multi-camera adapter is designed for connecting more than one MIPI camera to a single CSI camera port on the Raspberry Pi board. The V2.2 adapter board can connect 4 cameras on a single Raspberry Pi board.
 |
 |
Attention
The usage method and precautions of Arducam Adapter Board are slightly different from Arducam CamArray HAT, please refer to the following link for details:
Arducam Multi-Camera Adapter Board Quick Start Guide
Specifications
Dual-Camera Stereo Synchronized Kit
| Sensor | Resolution | SKU | Optical Format | Frame Rate |
|---|---|---|---|---|
| OV9281 | 1MP | B0263/B0337/B0266 | 1/4″ | RAW8/RAW10: 2560X800@60FPS, 2560X720@65FPS, 1280X400@150FPS |
| OV2311 | 2MP | B0264 | 1/2.9″ | RAW8/RAW10: 3200X1300@40FPS, 3200X1080@80FPS,2560X7200@150FPS |
| AR0234 | 2MP | B0492R | 1/2.6″ | RAW8/RAW10: 2560X720@93FPS, 3840X1080@38FPS,3840X1200@38FPS |
| IMX477 | 12MP | B0347R/B0265R | 1/2.3″ | 4056x3040@10fps, 2028x1529@40fps, 2028x1080@50fps |
Quad-Camera Stereo Synchronized Kit
| Sensor | Resolution | SKU | Optical Format | Frame Rate |
|---|---|---|---|---|
| OV9281 | 1MP | B0267 | 1/4″ | RAW8: 5120X800@45FPS, 5120X720@50FPS, 5120X400@150FPS RAW10: 5120X800@35FPS, 5120X720@40FPS, 5120X400@110FPS |
| OV9782 | 1MP | B0331 | 1/4″ | RAW8: 5120X800@45FPS, 5120X720@50FPS, 5120X400@150FPS RAW10: 5120X800@35FPS, 5120X720@40FPS |
| IMX219 | 8MP | B0396 | 1/4″ | 8MP@21fps, 1080p@30fps, 720p@120fps |
| IMX477 | 12MP | B0397 | 1/2.3″ | 4056x3040@10fps, 2028x1529@40fps, 2028x1080@50fps |
| IMX708 | 12MP | B0440 | 1/2.43″ | 4608x2592@10fps |
| IMX519 | 16MP | B0388 | 1/2.53″ | 4656x3496@10fps, 3840x2160@21fps, 1920x1080@60fps, 1280x720@120fps |
| / | 64MP | B0402 | 1/1.7″ | 9152x6944@2.7fps, 4624x3472@10fps, 3840x2160@20fps, 2312x1736@30fps |
| OV64A40 | 64MP | B0487 | 1/1.7″ | 9152×6944@2fps, 8000×6000@2.5fps, 4624×3472@7.6fps, 3840×2160@14.8fps, 2312×1736@26.7fps, 1920×1080@45fps. |
Mutli-Camera Kit
| Product Image | SKU | Sensor | Resolution | Pin/Connect Type | Features | Lens Type | Field of View(HxV) | Focus Type | IR Sensitivity |
|---|---|---|---|---|---|---|---|---|---|
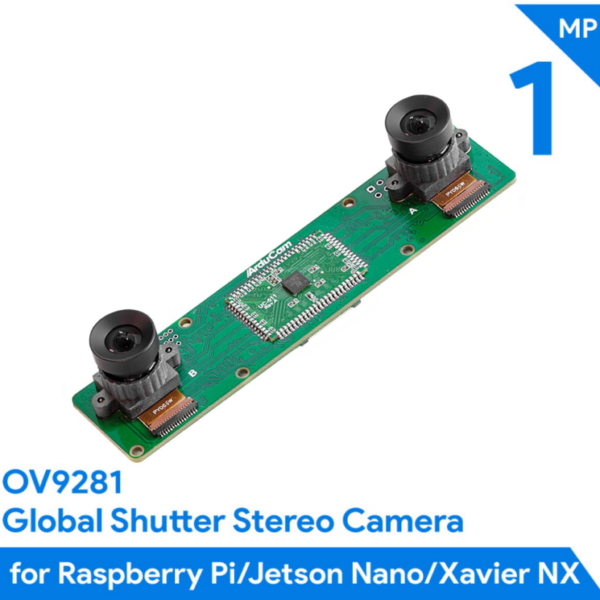 |
B0263 | OV9281 | 1MP | 15/Bottom | Mono Global Shutter Stereo Camera | M12 | 70°(H) x 43.75°(V) | Manual Focus | without IR-cut filter |
| B0264 | OV2311 | 2MP | M12 | 83°(H) x 67.5°(V) | |||||
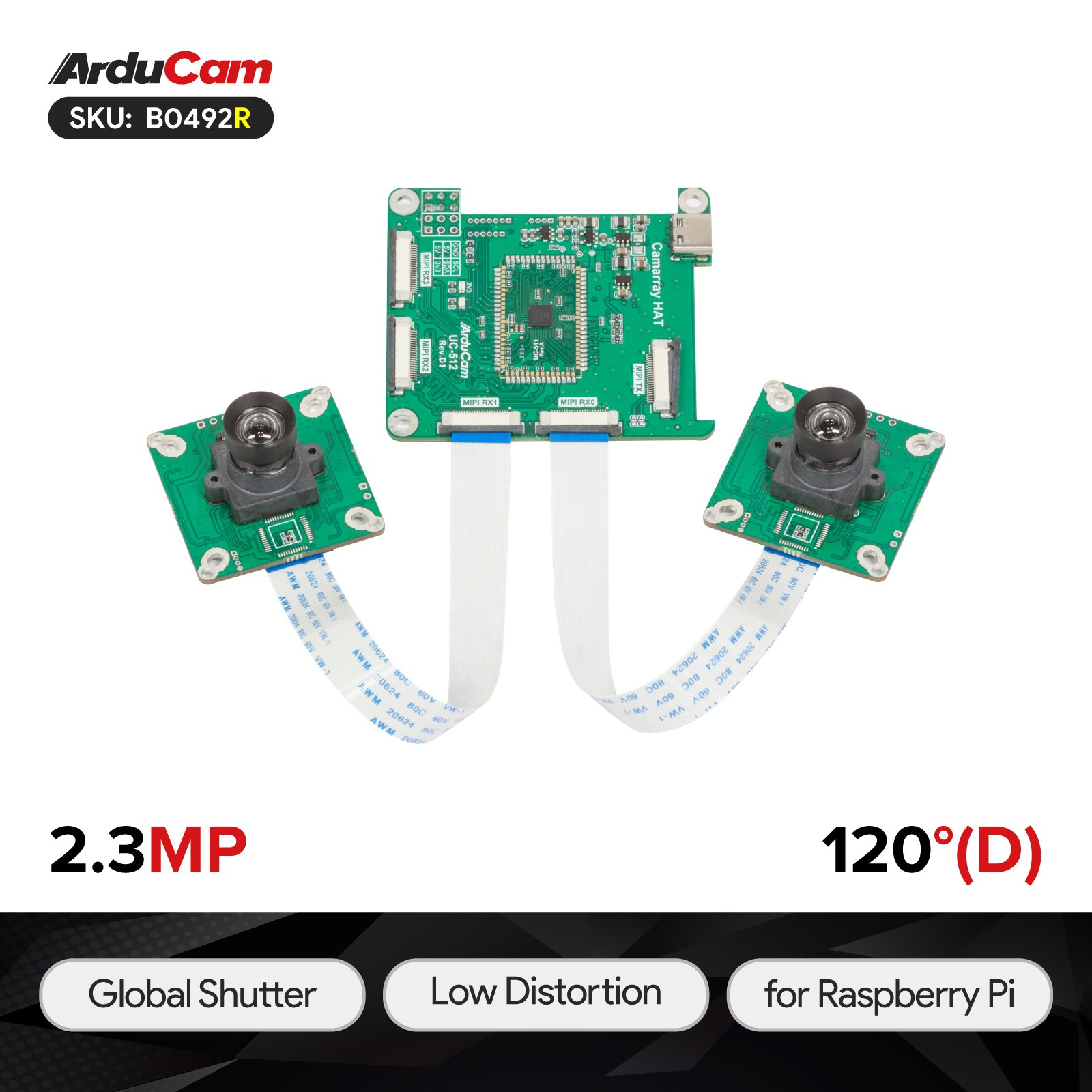 |
B0492R | AR0234 | 2MP | 22/Bottom | Color Global Shutter | M12 | 120°(D)×90°(H)×75°(V) | Manual Focus | Integrate IR-cut filter |
 |
B0350 | IMX219 | 8MP | 15/Bottom | 360° Stereo Camera | M12 | 220°(H) x 166°(V) | Manual Focus | 650nm IR-cut filter |
| B0347R | IMX477 | 12MP | Stereo Camera | M12 | 75°(H) x 56°(V) | ||||
| B0331 | OV9782 | 1MP | Color Global Shutter Quad Camera | M12 | 75°(H) x 46.8°(V) | without IR-cut filter | |||
 |
B0396 | IMX219 | 8MP | Quad Camera | Stock Lens | 62.2° (H) x 48.8(V) | Fixed Focus | 650nm IR-cut filter | |
| B0388 | IMX519 | 16MP | Stock Lens | 66°(H) x 49.5°(V) | Motorized Focus | ||||
| B0402 | 64MP | 64MP | Stock Lens | 72°(H) x 54.6°(V) | |||||
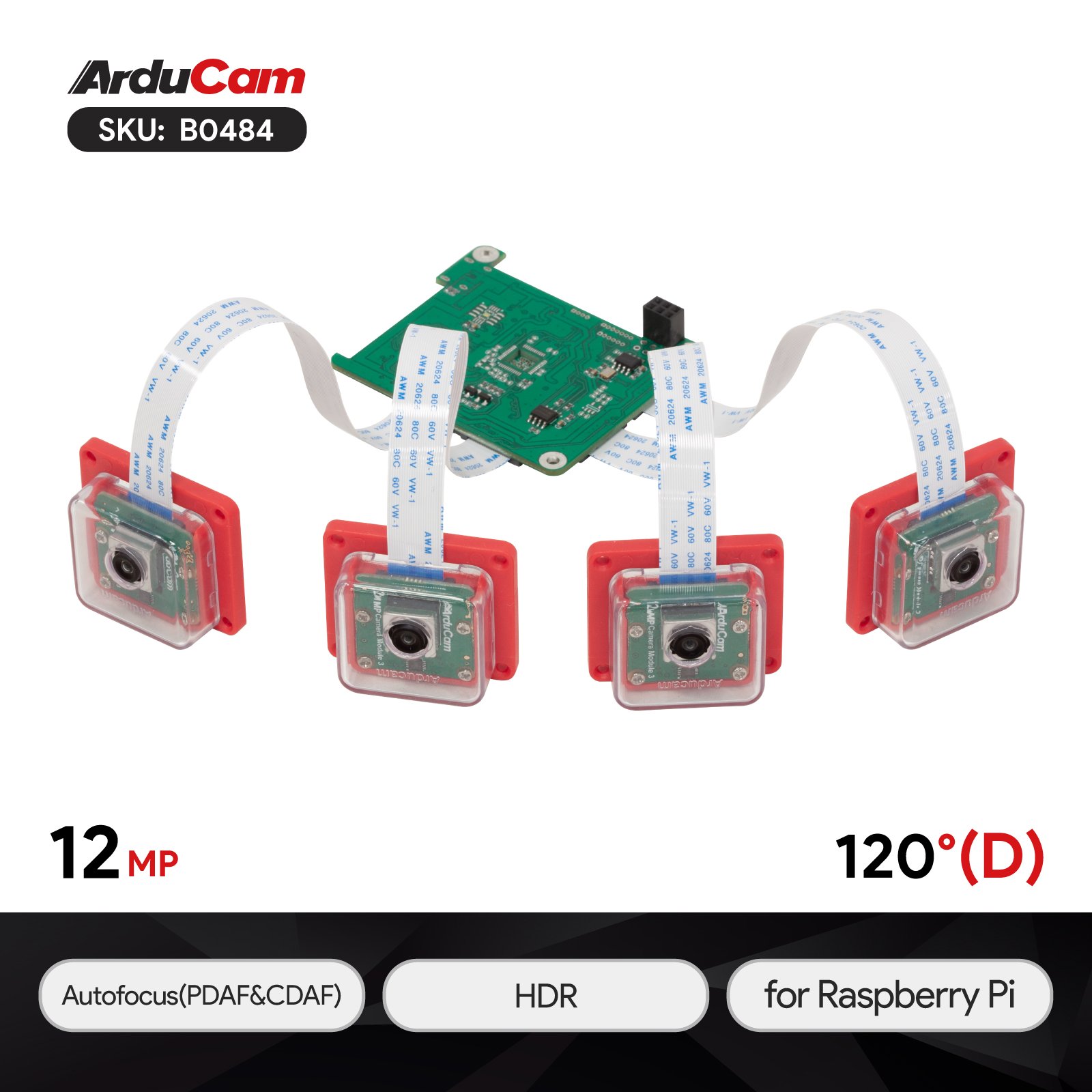 |
B0484 | IMX708 | 12MP | 15/Bottom | Wide Angle | Stock Lens | 120°(D)x100°(H)x72°(V) | Autofocus | 650nm IR-cut filter |
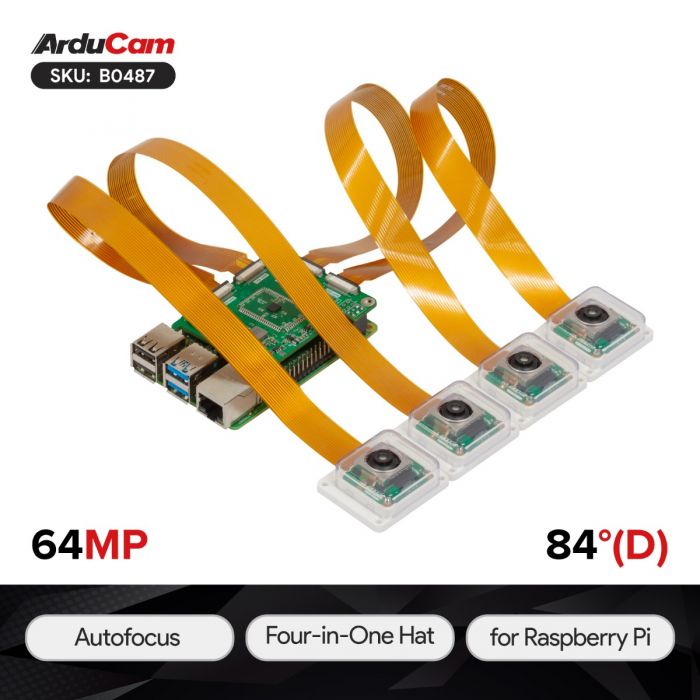 |
B0487 | OV64A40 | 64MP | 15/Bottom | High Resolution | Stock Lens | 84°(D)×68°(H)×56°(V) | Manual/Autofocus | 650nm IR-cut filter |
 |
B0266 | OV9281 | 1MP | 15/Bottom | Mono Global Shutter Stereo Camera | M12 | 70°(H) x 43.75°(V) | Manual Focus | without IR-cut filter |
| B0267 | 75°(H) x 46.8°(V) | ||||||||
 |
B0265R | IMX477 | 12MP | 15/Bottom | Stereo Camera | CS | 65°(H) x 48.7°(V) | Manual Focus | 650nm IR-cut filter |
| B0397 | Quad Camera | M12 | 75°(H) x 56°(V) | ||||||
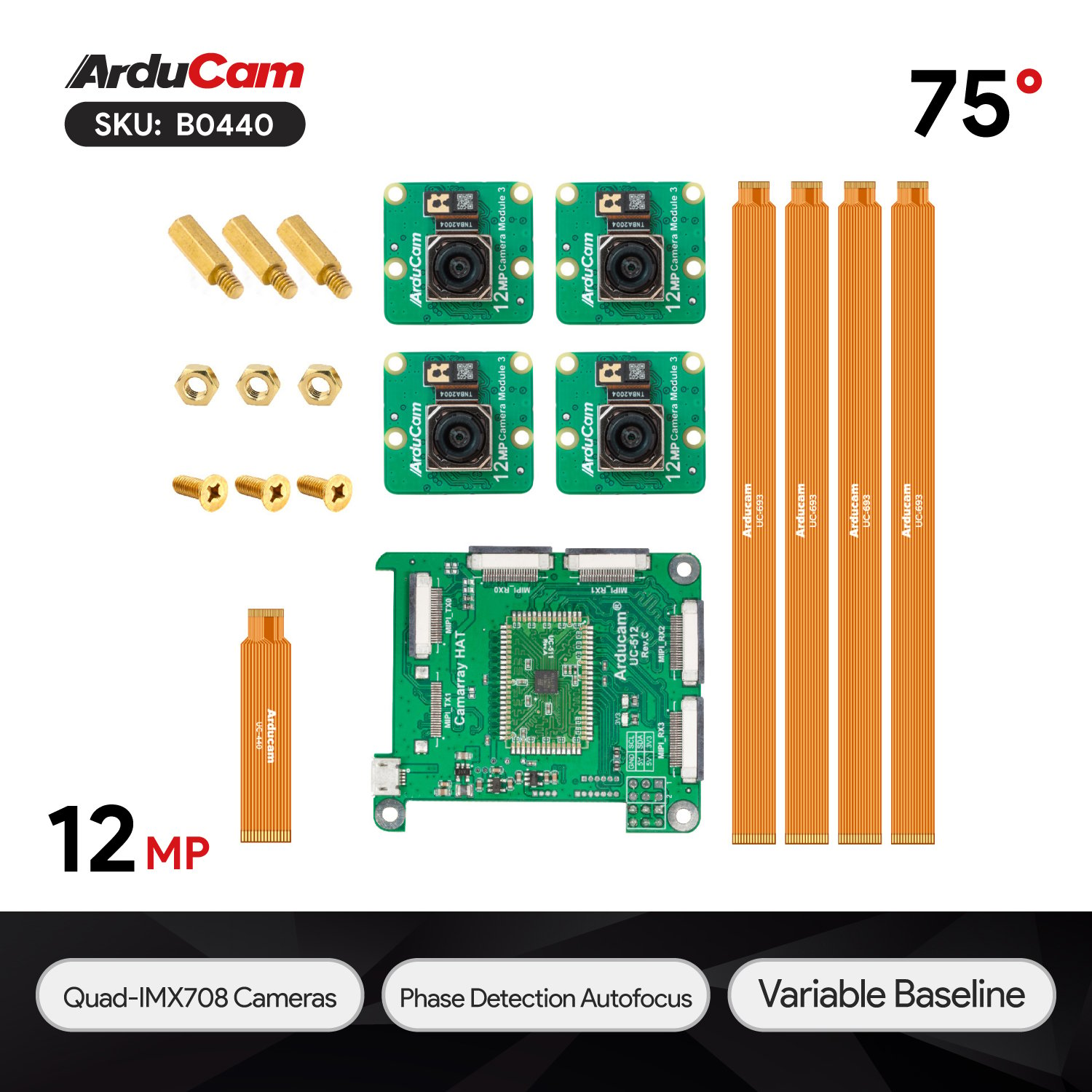 |
B0440 | IMX708 | 12MP | 15/Bottom | Quad Camera | Stock Lens | 66°(H)x41°(V) | Autofocus | 650nm IR-cut filter |
|
B016601 | NA | NA | NA | Dual-Camera Adapter Board | NA | NA | NA | NA |
|
B012001 | NA | NA | NA | Quad-Camera Adapter Board | NA | NA | NA | NA |