Quick Start Guide
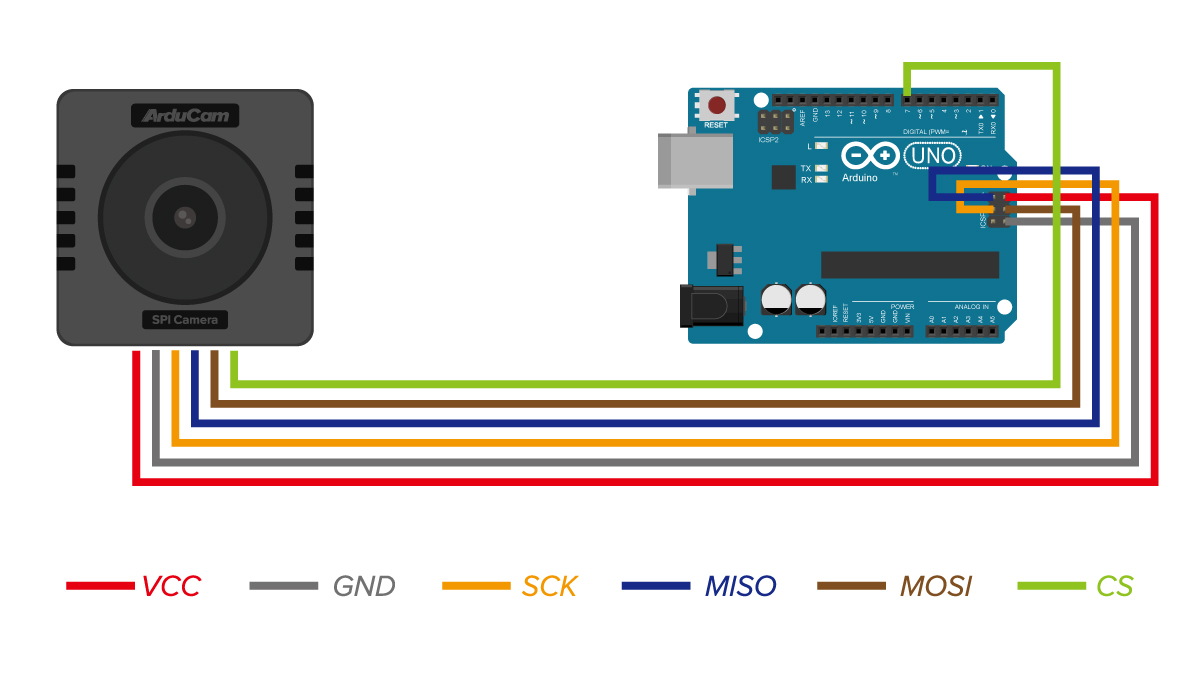
Hardware
Software
Environment configuration and use based on Arduino IDE
Step 1. Download Library
git clone https://github.com/ArduCAM/Arducam_Mega.git
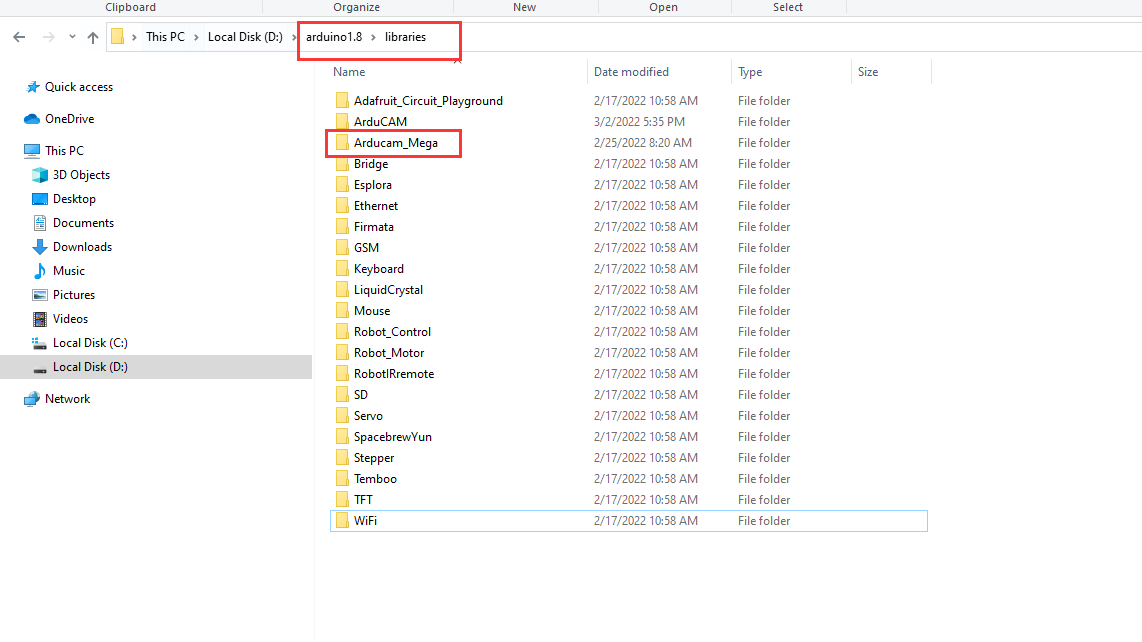
Step 2. Flash onto the Device
Note
This demo is based on the Arduino UNO development board
Copy the downloaded library file to the libraries folder
How it Works
Note
Arducam has released a full-featured script, which can be used to check all the functions of the Arducam Mega. Here we explain the specific workflow on Arduino UNO platform.
setup()
myUart.arducamUartBegin(921600);
myCAM.begin();
myCAM.registerCallBack(readBuffer,200);
Initialize serial communication
Initialize serial communication, used for communication of Arducam Mega software.
Initialize the camera
Use the begin() function to initialize the camera configuration.After this function runs, the camera will be configured as JPEG data format and the resolution will be the maximum.
- Function prototype:
CamStatus begin(ArducamCamera* camera);
Register callback function
Register the callback function. This function will be called in streaming mode.
- Function prototype:
void registerCallback(ArducamCamera* camera, BUFFER_CALLBACK function, uint8_t blockSize);
Warning
Transmission length should be less than 255
loop()
In the loop, it follows the specific protocol Arducam defined to parse command sent by Arducam Mega host and do specific operation to response each command. The detail script is here:
Serial data receiving
if (myUart.arducamUartAvailable())
{
temp = myUart.arducamUartRead();
arducamDelayMs(5);
if (temp == 0x55)
{
while (myUart.arducamUartAvailable())
{
commandBuff[commandLength] = myUart.arducamUartRead();
if (commandBuff[commandLength] == 0xAA)
{
break;
}
commandLength++;
}
myUart.uartCommandProcessing(&(myCAM.cameraInfo),commandBuff,commandLength);
commandLength = 0;
}
}
Protocol analysis
uint8_t ArducamLink::uartCommandProcessing(Arducam* myCAM,uint8_t* commandBuff)
{
ArducamCamera* cameraInstance = myCAM->getCameraInstance();
CamStatus state;
uint16_t gainValue = 0;
uint32_t exposureValue = 0;
uint32_t exposureLen1 = 0;
uint32_t exposureLen2 = 0;
uint32_t exposureLen3 = 0;
uint8_t cameraResolution = cameraInstance->currentPictureMode;
uint8_t cameraFarmat = cameraInstance->currentPixelFormat;
switch (commandBuff[0])
{
case SET_PICTURE_RESOLUTION: //Set Camera Resolution
cameraResolution = commandBuff[1] & 0x0f;
cameraFarmat = (commandBuff[1] & 0x70) >> 4;
myCAM->takePicture((CAM_IMAGE_MODE)cameraResolution,(CAM_IMAGE_PIX_FMT)cameraFarmat);
break;
case SET_VIDEO_RESOLUTION: //Set Video Resolution
cameraResolution = commandBuff[1] & 0x0f;
state = myCAM->startPreview((CAM_VIDEO_MODE)cameraResolution);
if (state == CAM_ERR_NO_CALLBACK)
{
Serial.println("callback function is not registered");
}
break;
case SET_BRIGHTNESS: //Set brightness
myCAM->setBrightness((CAM_BRIGHTNESS_LEVEL)commandBuff[1]);
break;
case SET_CONTRAST: //Set Contrast
myCAM->setContrast((CAM_CONTRAST_LEVEL)commandBuff[1]);
break;
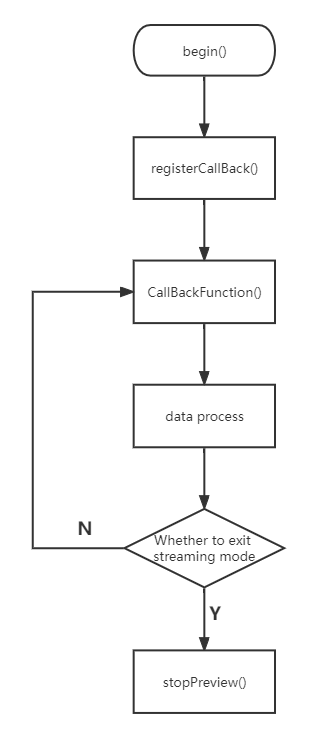
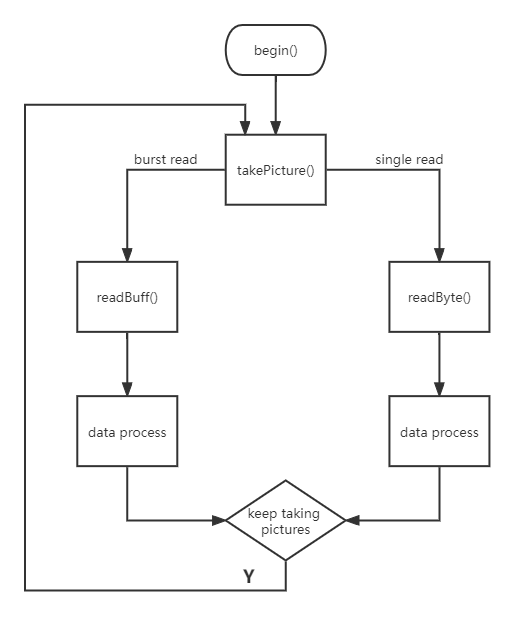
flow chart
take pictures
streaming mode