Quick Start Guide for Multi-Camera Adapter Board
Hardware
Abstract
Arducam offers multi-camera adapters to accommodate up to 4 camera modules on a single Raspberry Pi and switch between them quickly. The HAT-style quadruple adapter fits well with the Raspberry Pi A&B series, and the double adapter is perfect for the Pi Zero. You will read more about it in the following chapters.
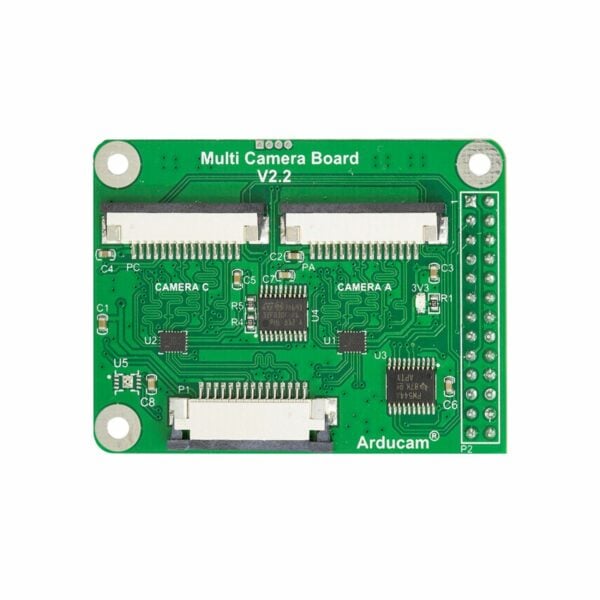
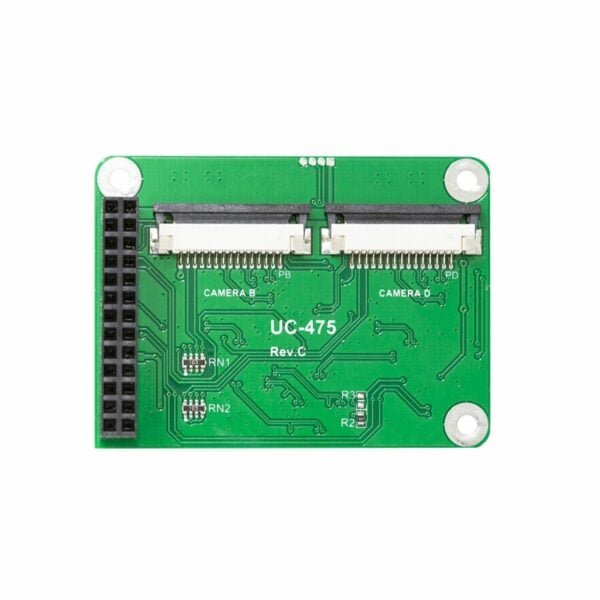
- Hardware Structure(Example as B012001)
 |
 |
- Connect and Insert the Multi-Camera Adapter Board into Raspberry Pi
 |
 |
- Connect the cameras to Multi-Camera Adapter Board
 |
 |
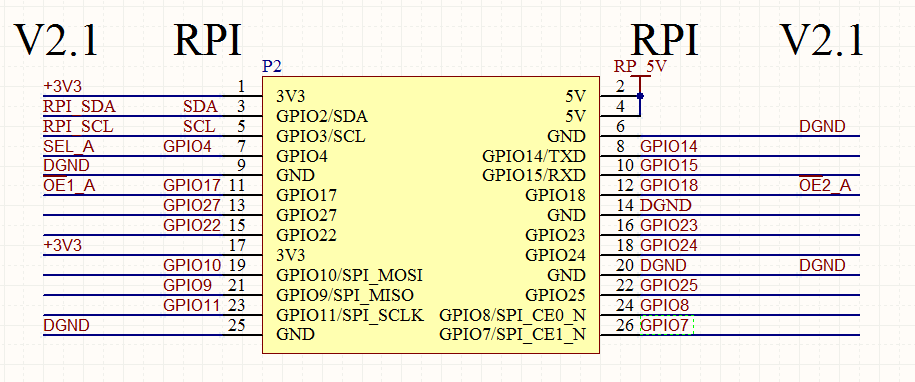
- Pinout Definition
Multi-Camera Adapter Board V2.1/V2.2 (SKU: B012001)
Software
Warning
We currently only guarantee that the Camera Adaptation is supported on Raspberry Pi Bullseye and Bookworm OS.
Supported Platforms and OS
| Note for Supported Platform and OS | |||
|---|---|---|---|
| Platform | Bookworm(rpicam/libcamera) | Bullseye(libcamera) | Buster(raspistill) |
| Raspberry Pi 5 | √ | ||
| Raspberry Pi 4B / 3B+ / 3A+ / Zero / Zero 2 W | √ | √ | |
| Raspberry Pi CM3 / CM3+ / CM4 (extra adapter board required) |
√ | √ | |
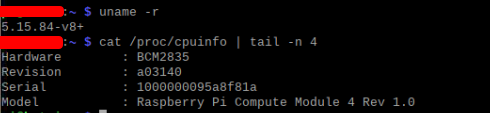
Update Kernel Version
Note: Please make sure your kernel version is up to date (at least 5.15.63 or later)
How to update the Kernel bersion:
sudo apt-get update
sudo apt-get upgrade
Supported Cameras
The following cameras will need the corresponding driver to be accessed:
| Sensor | Resolution |
|---|---|
| OV5647 | 5MP |
| IMX219 | 8MP |
| IMX477 | 12MP |
| IMX708 | 12MP |
| IMX519 | 16MP |
| 64MP Camera | 64MP |
Modify the Config.txt
For Quad-Camera Adapter Board(B012001):
sudo nano /boot/config.txt
#add Following content:
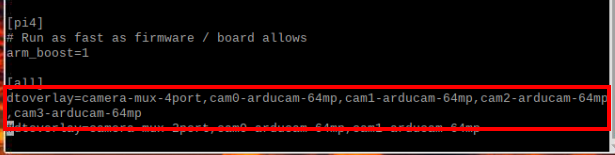
dtoverlay=camera-mux-4port,cam0-<camera sensor name>,cam1-<camera sensor name>,cam2-<camera sensor name>,cam3-<camera sensor name>
#Find the line "camera_auto_detect=1" and modify it:
camera_auto_detect=0
Note
Please manually add the number of cam according to the number of cameras you have connected.
Example: if you have three IMX219 cameras connected, enter:
dtoverlay=camera-mux-4port,cam0-imx219,cam1-imx219,cam2-imx219
Demo(64mp)
dmesg

For Dual-Camera Adapter Board(B016601):
sudo nano /boot/config.txt
add:
dtoverlay=camera-mux-2port,cam0-<you camera sensor>,cam1-<you camera sensor>
Note
Please manually add the number of cam according to the number of cameras you have connected.
Example: if you only have one IMX219 cameras connected, enter:
dtoverlay=camera-mux-2port,cam0-imx219
Run the Multi-Camera
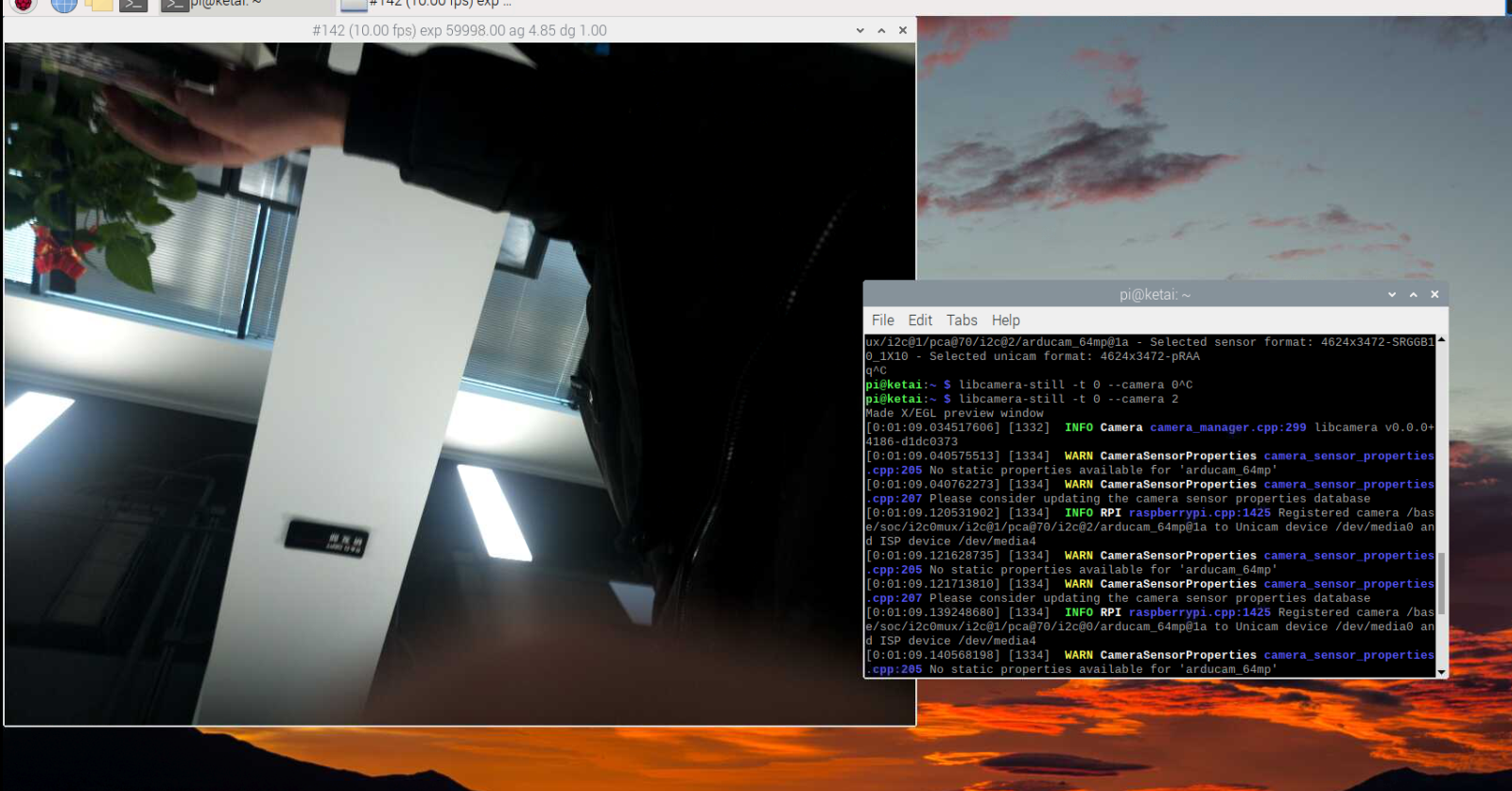
Use libcamera apps to access the Multi-Camera
libcamera-still -t 0 --camera <choose camera num>
Example:
Attention
For another libcamera apps like libcamera-raw, libcamera-vide, etc. You will need to manually add --camera <choose camera num> behind the command
python demos
previewOpencv.py source code:
from ast import Try
from PyQt5.QtWidgets import QLabel, QHBoxLayout, QVBoxLayout, QApplication, QWidget
from picamera2 import Picamera2
from PyQt5.QtGui import QImage,QPixmap
from PyQt5.QtCore import QThread
import RPi.GPIO as gp
import time
import os
width = 320
height = 240
adapter_info = {
"A" : {
"i2c_cmd":"i2cset -y 10 0x70 0x00 0x04",
"gpio_sta":[0,0,1],
}, "B" : {
"i2c_cmd":"i2cset -y 10 0x70 0x00 0x05",
"gpio_sta":[1,0,1],
}, "C" : {
"i2c_cmd":"i2cset -y 10 0x70 0x00 0x06",
"gpio_sta":[0,1,0],
},"D" : {
"i2c_cmd":"i2cset -y 10 0x70 0x00 0x07",
"gpio_sta":[1,1,0],
}
}
class WorkThread(QThread):
def __init__(self):
super(WorkThread,self).__init__()
gp.setwarnings(False)
gp.setmode(gp.BOARD)
gp.setup(7, gp.OUT)
gp.setup(11, gp.OUT)
gp.setup(12, gp.OUT)
def select_channel(self,index):
channel_info = adapter_info.get(index)
if channel_info == None:
print("Can't get this info")
gpio_sta = channel_info["gpio_sta"] # gpio write
gp.output(7, gpio_sta[0])
gp.output(11, gpio_sta[1])
gp.output(12, gpio_sta[2])
def init_i2c(self,index):
channel_info = adapter_info.get(index)
os.system(channel_info["i2c_cmd"]) # i2c write
def run(self):
global picam2
# picam2 = Picamera2()
# picam2.configure( picam2.still_configuration(main={"size": (320, 240),"format": "BGR888"},buffer_count=1))
flag = False
for item in {"A","B","C","D"}:
try:
self.select_channel(item)
self.init_i2c(item)
time.sleep(0.5)
if flag == False:
flag = True
else :
picam2.close()
# time.sleep(0.5)
print("init1 "+ item)
picam2 = Picamera2()
picam2.configure(picam2.create_still_configuration(main={"size": (320, 240),"format": "BGR888"},buffer_count=2))
picam2.start()
time.sleep(2)
picam2.capture_array(wait=False)
time.sleep(0.1)
except Exception as e:
print("except: "+str(e))
while True:
for item in {"A","B","C","D"}:
self.select_channel(item)
time.sleep(0.02)
try:
buf = picam2.capture_array()
buf = picam2.capture_array()
cvimg = QImage(buf, width, height,QImage.Format_RGB888)
pixmap = QPixmap(cvimg)
if item == 'A':
image_label.setPixmap(pixmap)
elif item == 'B':
image_label2.setPixmap(pixmap)
elif item == 'C':
image_label3.setPixmap(pixmap)
elif item == 'D':
image_label4.setPixmap(pixmap)
except Exception as e:
print("capture_buffer: "+ str(e))
app = QApplication([])
window = QWidget()
layout_h = QHBoxLayout()
layout_h2 = QHBoxLayout()
layout_v = QVBoxLayout()
image_label = QLabel()
image_label2 = QLabel()
image_label3 = QLabel()
image_label4 = QLabel()
# picam2 = Picamera2()
work = WorkThread()
if __name__ == "__main__":
image_label.setFixedSize(320, 240)
image_label2.setFixedSize(320, 240)
image_label2.setFixedSize(320, 240)
image_label2.setFixedSize(320, 240)
window.setWindowTitle("Qt Picamera2 Arducam Multi Camera Demo")
layout_h.addWidget(image_label)
layout_h.addWidget(image_label2)
layout_h2.addWidget(image_label3)
layout_h2.addWidget(image_label4)
layout_v.addLayout(layout_h,20)
layout_v.addLayout(layout_h2,20)
window.setLayout(layout_v)
window.resize(660, 500)
work.start()
window.show()
app.exec()
work.quit()
picam2.close()
For more details and source code, please refer to:
Github -- Multi-camera-Adapter-board-v2.2-python
Troubleshooting
1. Time-error-occurs-when-using-multi-camera-adapter-board-on-pi5