Point Cloud With Arducam ToF Camera – for Jetson
About Point Cloud
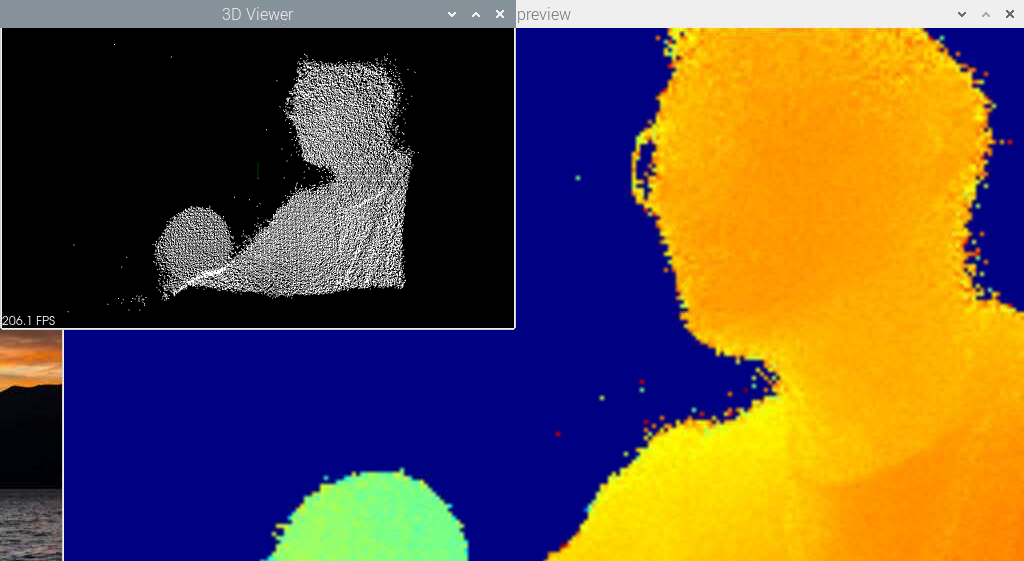
A point cloud is a set of data points in space. The points may represent a 3D shape or object. Each point position has its set of Cartesian coordinates (X, Y, Z). Point clouds are generally produced by 3D scanners or by photogrammetry software, which measure many points on the external surfaces of objects around them.
With the Point Cloud Library, you can quickly generate a real-time point cloud with Arducam ToF camera and your Raspberry Pi, and utilize it in various 3D processing software/algorithms.
Using Point Cloud with Arducam ToF Camera on Jetson
To properly use Point Cloud with Arducam ToF Camera, the camera driver and necessary dependencies have to be installed first.
- If you have NOT installed them yet, start from Step 1. (Step 1, 2, 3 are same commands as those instructed in <Getting Started: Arducam ToF Camera for Raspberry Pi>
- If you have already installed them, please start from Step 4.
Step 1. Pull the repository.
git clone https://github.com/ArduCAM/Arducam_tof_camera.git
Step 2. Change the directory to Arducam_tof_camera
cd Arducam_tof_camera
Step 3. *Installation (Driver, Dependencies, SDK, OpenCV)*
./Install_dependencies_jetson.sh
When you see the reboot prompt, enter y.
Step 4. Installing PCL
sudo apt-get update
sudo apt install libpcl-dev
Step 5. Compile
cd Arducam_tof_camera/pcl_preview
mkdir build && cd build
cmake ..
make
Step 6. Run the example
Run in the pcl_preview/build folder
./preview_pointcloud