Troubleshooting – Arducam ToF Camera
Notice
Thank you for trying our latest product, the Time of Flight (ToF) camera.
Arducam puts quality first as this is how we deliver added value to you, users. Apart from the solid implementation of Total Quality Management (TQM) and carrying out ISO 9001 throughout the whole producing process both in-house and compliant subcontracting, every single camera has to pass the inline and final inspection before getting a qualification release.
Failure to successfully use a camera, however, still might happen. Besides possible product defects, there are many other influential factors, including but not limited to transportation damage, negative environmental conditions, improper ways of use, etc.
Tips
If your Arducam ToF camera does not work as described, it is highly recommended, for a very likely obtained time-saving, that you go through this checklist before reaching out to our support team.
- Make sure a recommended OS version is used for your Raspberry Pi or NVIDIA Jetson. (Pls refer to their respective docs)
- Make sure the cable on the camera board is locked in place.
- Make sure the cable is correctly inserted in the connector.
- Avoid high temperatures.
- Avoid water, moisture, or conductive surfaces while in operation.
- Avoid folding, or straining the flex cable.
- Avoid cross-threading with tripods.
- Gently push/pull the connector to avoid damaging the printed circuit board.
- Avoid moving or handling the printed circuit board excessively while it’s in operation.
- Handle by the edges to avoid damage from electrostatic discharge.
- Where the camera board is stored should be cool and as dry as possible.
- Sudden temperature/humidity changes may cause dampness in the lens and affect the image/video quality.
Troubleshooting (continuously updating)
Before Troubleshooting
If the camera does not work properly, please first run the following commands to do a general check.
Then, please feedback us the respective return value on your screen, so that our support team can recognise the issue much quicker.
pip3 list | grep ArduCamDepthCamera
dpkg -l | grep arducam-tof-sdk-dev
ls /dev/video*
FYI. The correct return value should be like:

Tips
If you encounter one or some of the following listed issues, please try our respective suggestions. And do not hesitate to contact us at support@arducam.com if the issue still exists.
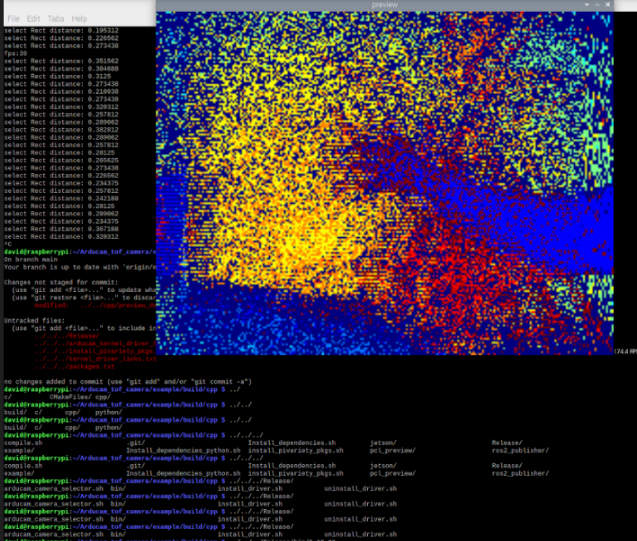
1. Abnormal Performance
A Group of abnormal performance (incl. but not limited to)
- Interlacing
- Noise
- Wrong depth data
- Point cloud failure
Troubleshooting
Please update SDK (Software Development Kit) to the latest version 0.0.7 by running the commands below.
sudo apt update
sudo apt install arducam-tof-sdk-dev
Examples of symptoms
- Interlacing. This is most likely caused by the old SDK version.
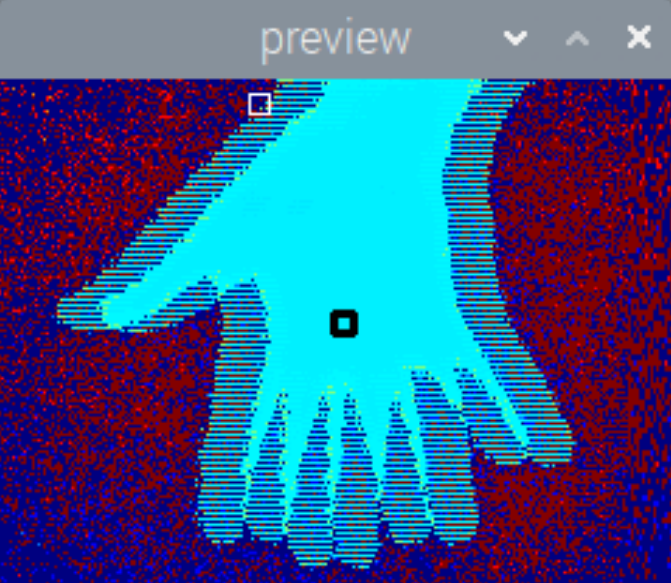
- Noise.
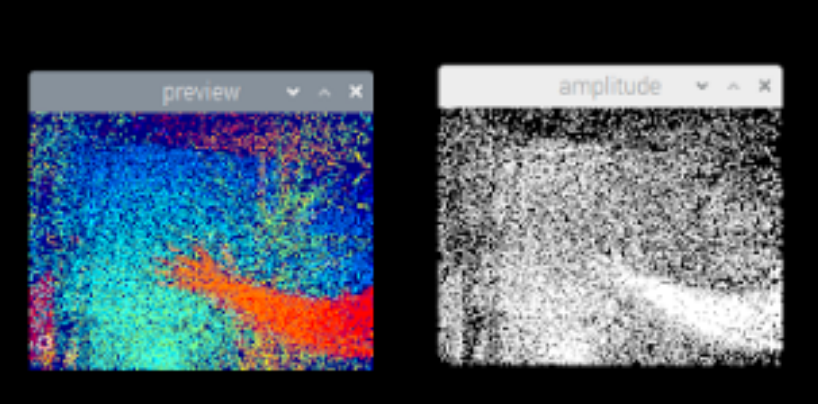
- Wrong depth data.
- Pointcloud failure.
2. How can I change modes btw 2m and 4m?
Troubleshooting
Please run the below commands:
if (tof.start()){
std::cerr<<"Failed to start camera"<<std::endl;
exit(-1);
}
// Modify the range also to modify the MAX_DISTANCE
tof.setControl(ArduCam::RANGE,MAX_DISTANCE);
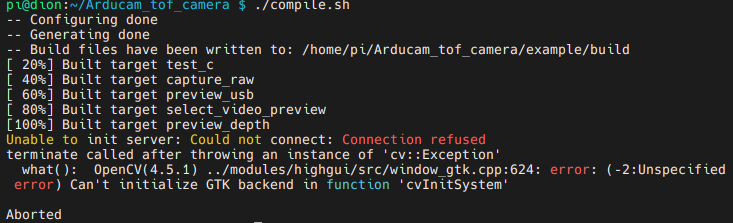
3. SSH way leads the compilation failure
If you are using the SSH way to connect to your Raspberry Pi and facing the error like the screenshot below.
You need to run the command 'export DISPLAY=:0' in the terminal first. Or you need to connect your Raspberry pi with a monitor instead of ssh way.
More suggestions are to be continuously updated.
4. Cannot be used on Raspberry Pi5
Attention on Raspberry Pi 5
You will require updating the camera firmware for the first time using Arducam ToF on Pi5. Please refer to the following content to update:
-
Enter Recovery Mode
Please refer to the following content to enable the recovery mode:
Step1. Connect Arducam ToF camera to Raspberry Pi
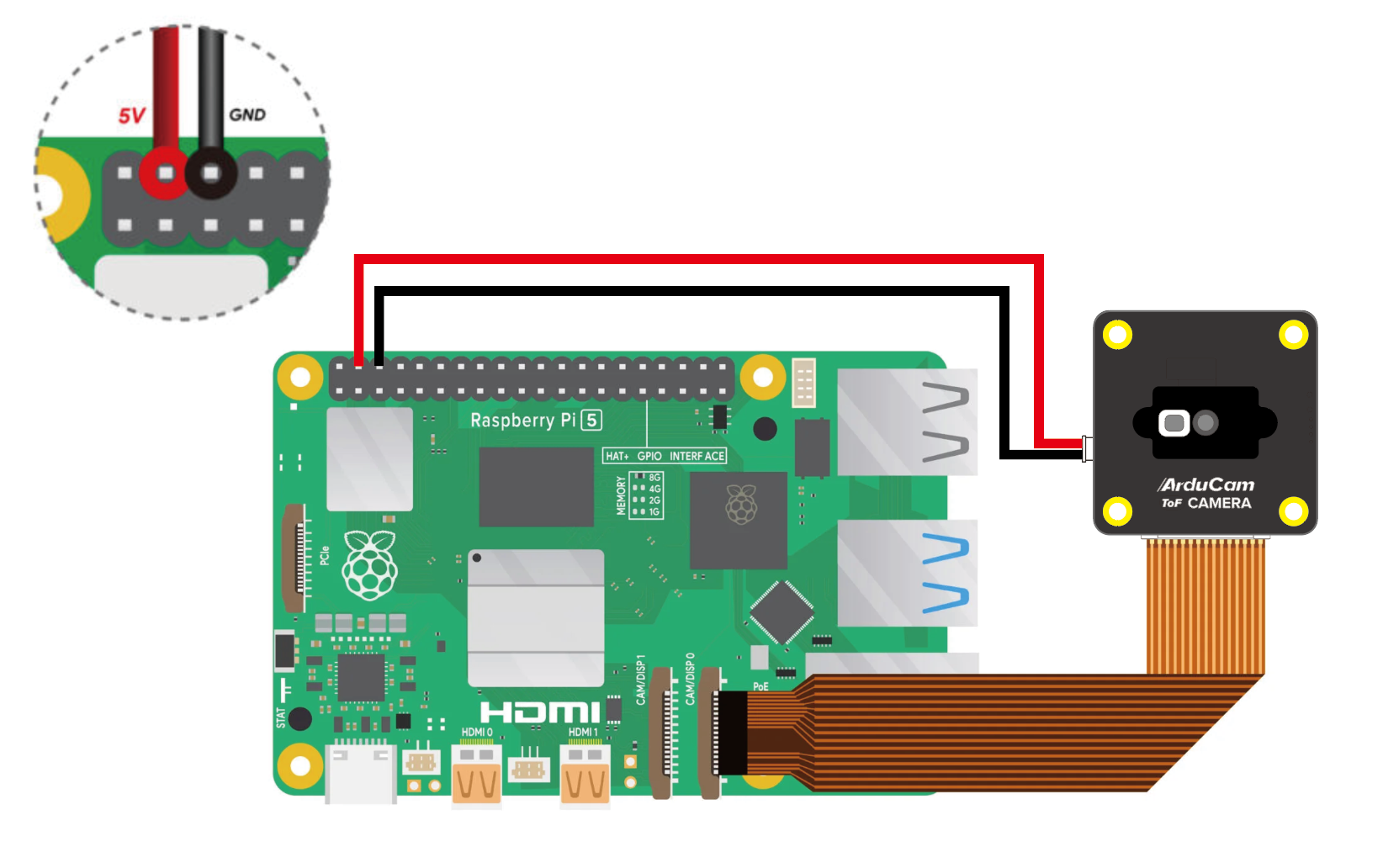
Step2. Keep your Raspberry Pi Power off
Please keep your RPI Power off and Enable recovery on Arudcam ToF camera board using Dupont Line:
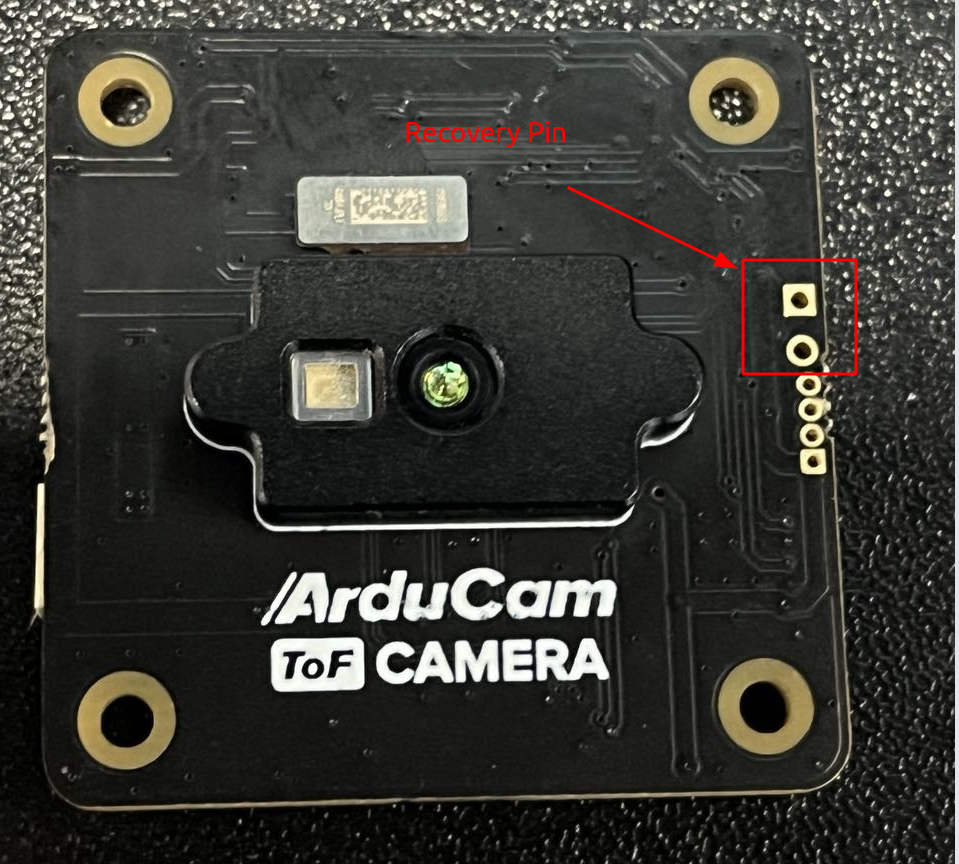
[The following camera diagram is for reference only:]
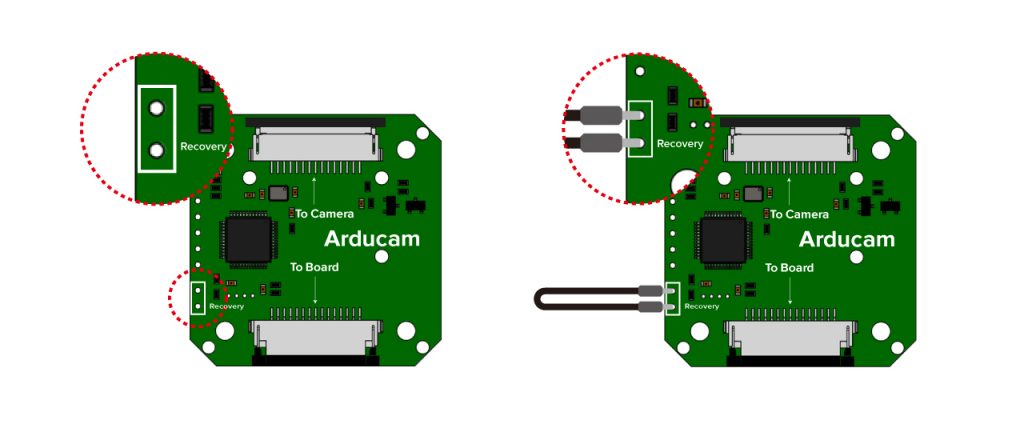
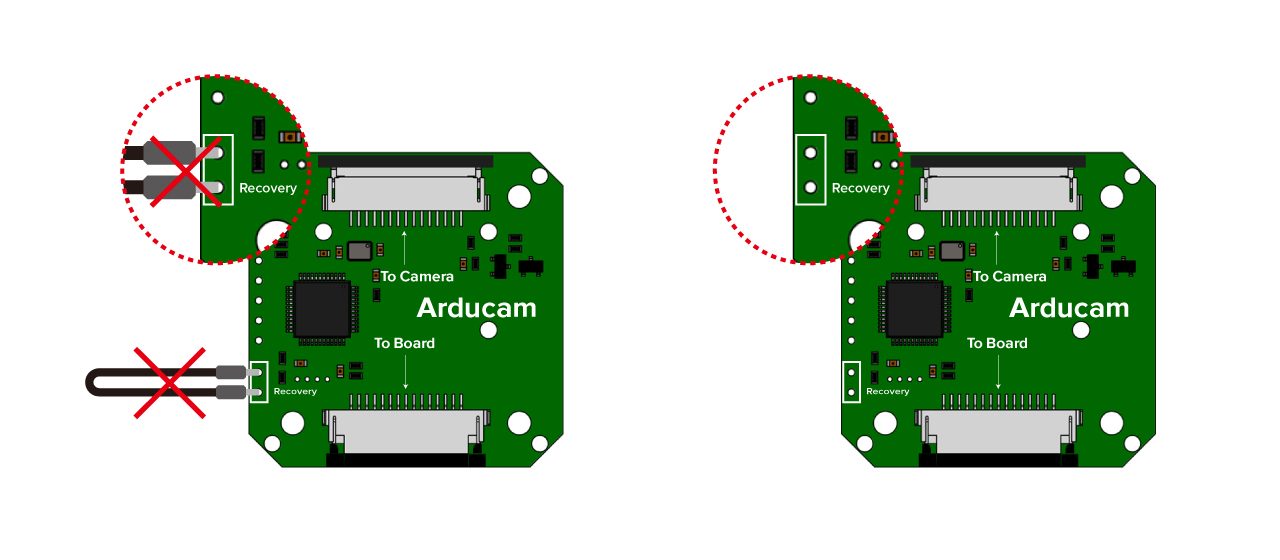
Step3. Power on your Raspberry Pi
Please Disable recovery after powering on RPi:
[The following camera diagram is for reference only:]
-
Download Firmware Update Tool
Arducam_ToF_B0410_Firmware_Update_Tool
-
Install Dependencies
sudo apt update -y && sudo apt install -y libtinfo5
-
Unzip the Update Tool
Tip
You can check whether it is 32bit or 64bit through the dpkg --print-architecture command. Then you can execute the following commands according to the os version:
tar xzvf B0410_Tof_Firmware.tar.gz
# for 64bit os
cd B0410_Tof_Firmware/aarch64/
# for 32bit os
cd B0410_Tof_Firmware/armv7l/
tar xzvf B0410_Tof_Firmware.tar.gz
cd b0410_tof_firmware/
-
Update Firmware
Check i2c bus:
dmesg | grep arducam

Execute the update:
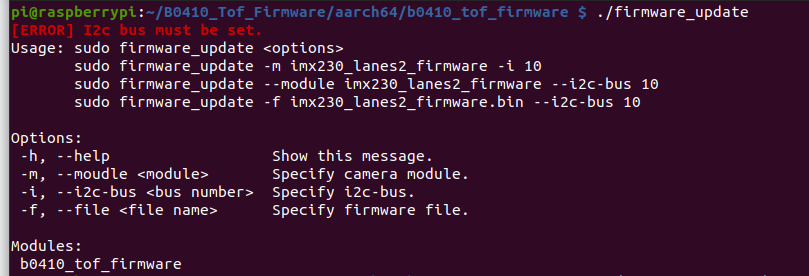
sudo ./firmware_update -i 4 -m b0410_tof_firmware
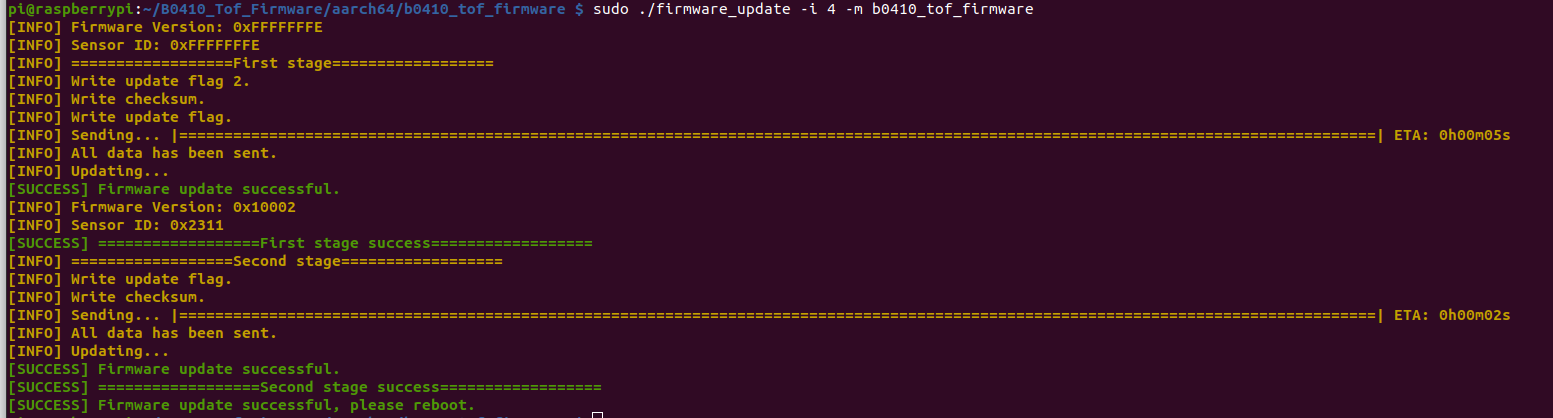
Warning
You need to enter Recovery mode before updating. Please refer to the following operation to enter the Recovery mode:
If the Firmware Version is not 0xFFFFFFFE, it means that the Recovery mode has not been entered.
Reboot
sudo reboot
-
Appendix
help message: